磁力攪拌器是科研和生產中的常用溶液系 部件 ,當前普遍采用的傳統
磁力攪拌器基本是 采用交流串勵電機, 通過調節交流電壓實現轉 速調節 ;由于交流串勵電機的轉速隨轉矩及電 源電壓變化很大 ,在實驗進程或外部因素對實 驗體系的溶液粘滯系數等物理性質產生影響 時,出現很大的轉速誤差 ,甚**停轉現象 ;另外 , 因傳統的
磁力攪拌器不具有智能化 ,不能及時 對異常情況進行處理 ,對科研和生產造成了較 大的危害。應科研工作需要, 我們研制開發出 采用89C51 單片機產生數字化的控制信號, 驅 動步進電機 ,再由步進電機帶動新型強力釹鐵 硼磁鐵組成的磁力攪拌部分。從根本上解決了 傳統的磁力攪拌器轉速誤差大、轉矩小和低速 性能差的缺陷,使用效果良好。
1 基本原理
本機主要分為硬件和軟件兩部分。硬件是系統運行的基礎。本設計采用 ATMEL 公司的 89C2051 單片機為核心 , 以步進電機為換能元件,為系統的運轉精度和智能化提供了保證。軟件是系統運行的靈魂。軟件采用即時讀取用戶設定參數,修正步進電機的驅動信號的方法 , 并通過霍爾傳感器, 監控步進電機的轉動狀態 , 對異常情況監控 ,及時進行修正和處理 ,達到了精確、及時、長期穩定的攪拌速率控制的目標。
1 .1 硬件電路簡介
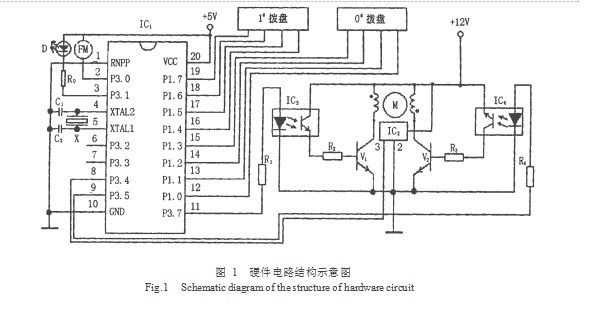
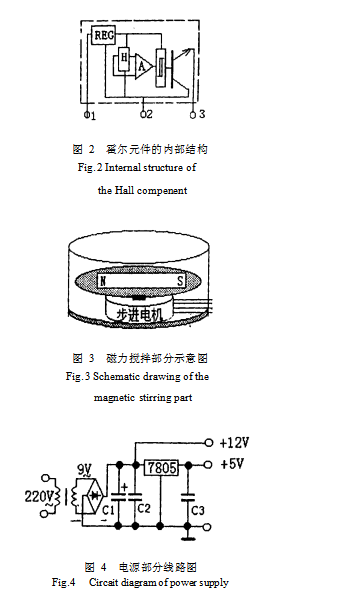
本機的硬件電路由控制部分、隔離放大部分、執行部分、反饋檢測部分和電源部分等單元組成。硬件電路結構如圖 1 所示。基本工作過程如下 :89C2051 單片機從 P1 口讀取兩只十進制編碼開關的設定值, 根據設定值產生 2 路定寬調頻時序脈沖控制信號, 2 路時序脈沖控制信號經P3 .4口和 P3 .5口分別送**光電耦合器 IC3 和 IC4 隔離,再經功率驅動電路放大驅動步進電機;步進電機的旋轉動作由霍爾傳感器 IC2 檢測, 反饋回單片機 P3 .4 口, 以判斷步進電機的運轉狀態;若步進電機運轉失常, 則從 P3 .0 口驅動蜂鳴器(FM)發出 5 分鐘的間斷報警信號,同時 P3 .1口發出故障指示信號。霍爾元件的內部結構如圖 2 所示。磁力攪拌部分示意圖如圖 3 所示。條形磁鐵采用新型釹鐵硼強力磁鐵。電源部分如圖 4 所示。
1 .2 軟件簡介
本機軟件采用查詢方式工作。通過即時讀取撥盤開關的 8 位數據,以定寬調頻的方式, 通過修改步進電機的占空比 ,來調整步進電機的轉速 ,并在每步步進信號發出后,通過檢測霍爾元件的反饋信號達到監控步進電機的轉動狀態的目的。軟件流程如圖 5 所示。
2 使用方法
使用本機時 , 應將主機部分置于干燥通風

處 ,攪拌部分的環境溫度不應高于 150 ℃;高速攪拌時應采用磁性較強的磁子 ,以保證攪拌所需的轉矩。另外 ,主機在高精度系統使用時,應正確選擇攪拌轉速 , 以減小由于攪拌能量功熱轉換引起的系統溫度誤差。
3 討 論
由于本機是應科研課題專門開發設計的部件 ,因此存在一定的局限性。但其轉速精度高、轉矩大、低速性能好的特點是傳統磁力攪拌器無以倫比的。在今后的工作中 , 我們將進一步發揮單片機的優勢 , 開發出可程控化的實現多
|
時段、多轉速,且具有轉速顯示及可以驅動多個 |
攪拌部分的低成本、多功能的新型磁力攪拌器。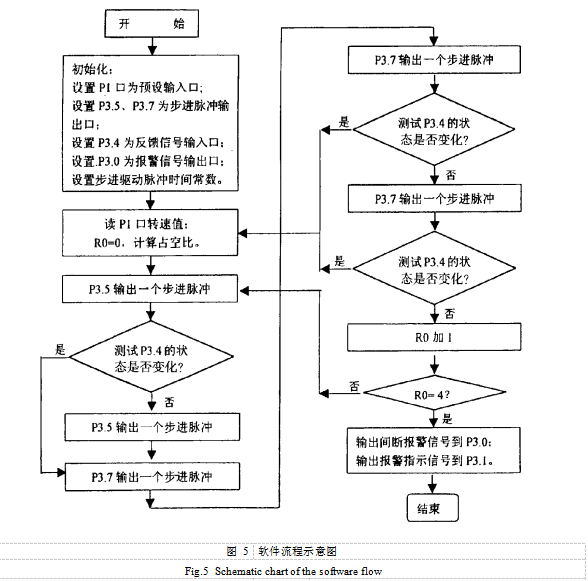 |